坐标变换的含义
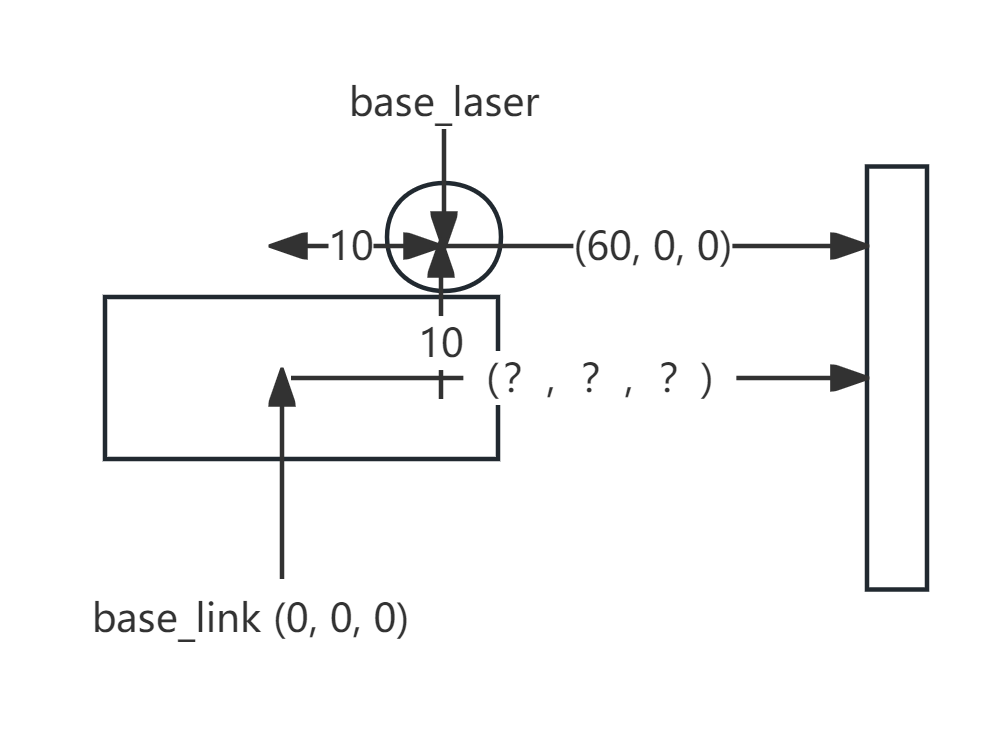
假设有一个小车,小车上有一个雷达,右边是一堵墙,已知小车的坐标原点 base_link 与雷达坐标原点 lase_laser 横竖距离 10cm , 既雷达相对小车的坐标为 (10, 0, 10),
雷达探测到墙体的坐标为 (60, 0, 0) ,求墙体相对小车的坐标?
假设有一个小车,小车上有一个雷达,右边是一堵墙,已知小车的坐标原点 base_link 与雷达坐标原点 lase_laser 横竖距离 10cm , 既雷达相对小车的坐标为 (10, 0, 10),
雷达探测到墙体的坐标为 (60, 0, 0) ,求墙体相对小车的坐标?
一个实际的机器人一般包括 N 个节点,实际运行调试时每个节点开一个终端去启动效率太低,也不方便管理。
Launch 脚本就是用于启动多个节点,支持不同节点使用不同的配置及参数,方便在不同环境下启动配置不同的机器人程序。
ROS2 节点可以声明多个参数,其它节点可以查看或修改参数,参数的设置和获取实际是通过服务实现的,只是 ROS2 提供了针对参数提供了更加方便的 API
创建一个功能包
ROS2 中的服务就类似于 RPC 调用,每个节点提供服务,其它节点可以调用服务并获取返回值
查看节点提供的服务
| |
| |
服务和话题一样,包括服务名和服务参数定义,可以查看服务的详细定义
ROS2 中节点通过发布和订阅话题来传递信息,一个节点可以作为发布者发布信息,也可以同时作为订阅者订阅其它节点发布的话题。
话题由主题和消息类型组成:
启动小海龟节点