安装非官方驱动: https://github.com/PixlOne/logiops ,安装完后启动服务
1sudo systemctl enable --now logid执行
sudo logid查看识别的鼠标名称1[INFO] Device found: G502 HERO Gaming Mouse on /dev/hidraw4:255配置文件
/etc/logid.cfg
这个驱动还有很多其它功能,比如 dpi 切换,功能键设置等,有需要可以看 Wiki
安装非官方驱动: https://github.com/PixlOne/logiops ,安装完后启动服务
| |
执行 sudo logid 查看识别的鼠标名称
| |
配置文件 /etc/logid.cfg
这个驱动还有很多其它功能,比如 dpi 切换,功能键设置等,有需要可以看 Wiki
虽然当前 WSL2 通过 WSLg 已支持直接运行 Gazebo,即使启用了 GPU 硬件加速,其图形性能仍显著受限,导致仿真过程非常卡顿。因此,更推荐的方式是将 Gazebo 运行在原生 Ubuntu 系统上。如果你不想配置双系统,也可以采用以下替代方案:在 Windows 原生环境中运行 Gazebo 仿真器,同时在 WSL2 中运行 ROS 2 节点控制 Gazebo。
URDF 使用 xml 格式描述机器人模型
首先创建一个包来保存文件 ros2 pkg create robot_describes --destination-directory=src --build-type=ament_cmake --license Apache-2.0
| |
xacro 工具可以将 xacro 描述文件转成 xml 文件,xacro 对比原生 xml 提供了一些方便的功能,比如宏
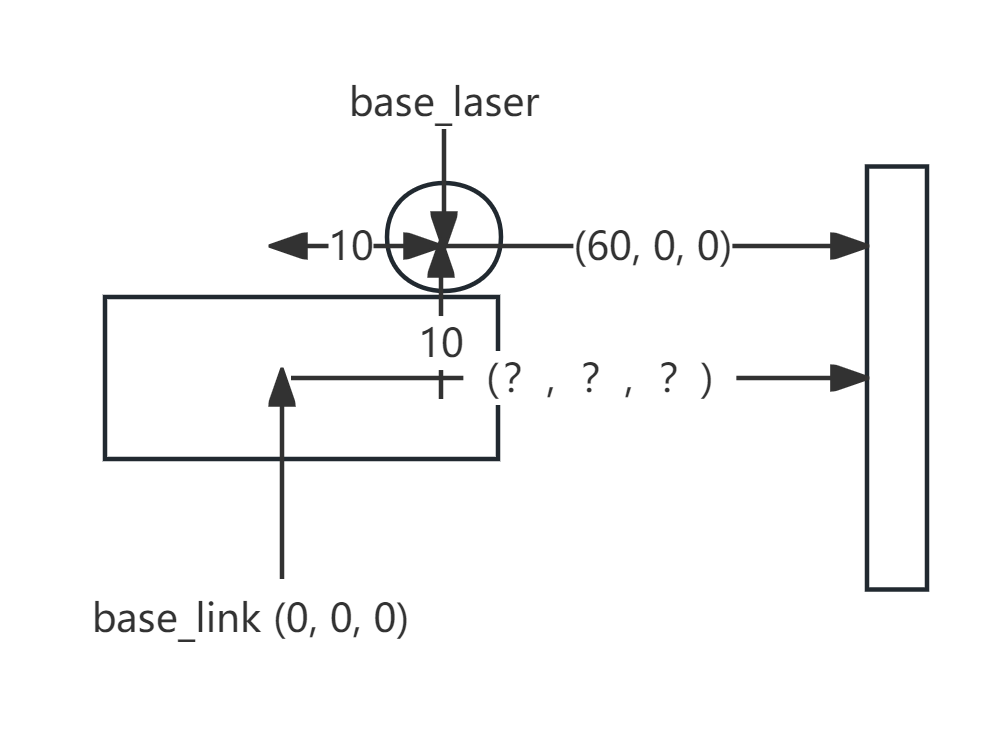
假设有一个小车,小车上有一个雷达,右边是一堵墙,已知小车的坐标原点 base_link 与雷达坐标原点 lase_laser 横竖距离 10cm , 既雷达相对小车的坐标为 (10, 0, 10),
雷达探测到墙体的坐标为 (60, 0, 0) ,求墙体相对小车的坐标?